本站5月9日消息,據(jù)媒體報道,由華南理工大學李云泉教授和陳曄教授領(lǐng)導的科研團隊成功研發(fā)出一款名為“兩棲機器狗”(ARD)的仿生機器人。
這款機器人長300毫米,寬100毫米(11.8英寸 x 3.9英寸),重2.25公斤(5磅),能夠在陸地和水中高效運動。
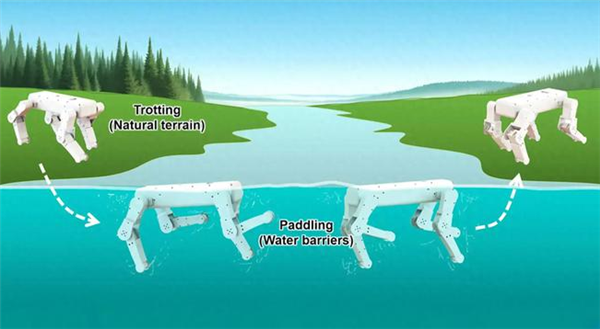
在陸地上,ARD采用雙關(guān)節(jié)腿的小跑步態(tài),最高奔跑速度可達1.2 BL/s(體長每秒)。而在水中,它仍能以0.54 BL/s的速度游泳,接近真實犬類狗刨游泳速度(約1.4 BL/s)的40%。

ARD的設(shè)計不僅具備防水和浮力特性,科學家還特別優(yōu)化了其重心與浮力中心的平衡,以確保穩(wěn)定的水生性能。團隊測試了三種不同的游泳步態(tài):兩種“橫向順序劃槳步態(tài)”(LSPG),即狗刨的變體;以及“小跑式劃水步態(tài)”(TLPG),采用對角線雙腿同步運動(左前/右后,右前/左后)。
實驗結(jié)果顯示,33% LSPG的游泳速度最快(0.54 BL/s),而TLPG雖然速度稍慢,但穩(wěn)定性最佳。
研究人員指出,ARD的成功得益于其仿生軌跡規(guī)劃技術(shù),該技術(shù)精準模仿了真實犬類的自然運動模式。這一突破為未來水陸兩棲機器人的設(shè)計提供了重要參考,在救援、探測等領(lǐng)域具有廣闊的應用前景。
鄭重聲明:本文版權(quán)歸原作者所有,轉(zhuǎn)載文章僅為傳播更多信息之目的,如作者信息標記有誤,請第一時間聯(lián)系我們修改或刪除,多謝。



